
Stuck on an issue?
Lightrun Answers was designed to reduce the constant googling that comes with debugging 3rd party libraries. It collects links to all the places you might be looking at while hunting down a tough bug.
And, if you’re still stuck at the end, we’re happy to hop on a call to see how we can help out.
No transform from [...] to [map]
See original GitHub issueI run:
ros2 launch linorobot2_bringup bringup.launch.py
ros2 run teleop_twist_keyboard teleop_twist_keyboard
ros2 launch linorobot2_navigation slam.launch.py rviz:=true
to slam, but I the transform wasn’t working. And rviz has a lot of errors displayed all related to transform.



I’m new to ROS2 and wasn’t able to Identify and fix the problems…
URDF looks ok and working:

Topic list:
/clicked_point
/cmd_vel
/diagnostics
/goal_pose
/imu/data
/initialpose
/joint_states
/map
/map_metadata
/map_updates
/odom
/odom/unfiltered
/parameter_events
/robot_description
/rosout
/scan
/set_pose
/slam_toolbox/feedback
/slam_toolbox/graph_visualization
/slam_toolbox/scan_visualization
/slam_toolbox/update
/tf
/tf_static
- System info System config: 2wd System: Jetson nano OS: Ubuntu 20.04 from Qengineering Base board: Teency 4.0 Lidar: Rplidar IMU: MPU-9250 Motor driver: L298N
Issue Analytics
- State:

- Created a year ago
- Comments:6 (3 by maintainers)
 Top Results From Across the Web
Top Results From Across the Web
No transform from [base_link] to [/map] - ROS Answers
On the left-hand side of RViz will be your "Displays" tab. Under there, drop down "Global Options" (with the gear icon). Double click...
Read more >RVIZ: No transform from [object] to [map] : r/ROS - Reddit
This basically means that there is no transformation from the robot model to the map. Usually this is a navigation/localisation stack problem.
Read more >No transform between frames map and base_link ... - TI E2E
A static transform would mean that the base footprint would never move, which is not desired in this case.
Read more >No transform from [map] to [odom] in ros - Stack Overflow
I created a node to map the turtlebot3_world, since in turtlebot3_world.launch there is no map frame, i assigned map_msg.header.frame_id ...
Read more >no transform from map to base_link · Issue #1330 - GitHub
hi there, i am using real time 2D cartographer with a RPLidar A2 and IMU MPU9250 on ROS melodic. The IMU is connected...
Read more > Top Related Medium Post
Top Related Medium Post
No results found
 Top Related StackOverflow Question
Top Related StackOverflow Question
No results found
 Troubleshoot Live Code
Troubleshoot Live Code
Lightrun enables developers to add logs, metrics and snapshots to live code - no restarts or redeploys required.
Start Free Top Related Reddit Thread
Top Related Reddit Thread
No results found
 Top Related Hackernoon Post
Top Related Hackernoon Post
No results found
 Top Related Tweet
Top Related Tweet
No results found
 Top Related Dev.to Post
Top Related Dev.to Post
No results found
 Top Related Hashnode Post
Top Related Hashnode Post
No results found
Silly question, how about the
/scantopic?Thank you for the head-up! I have found the cause of the problem. I was thinking about where is the laser scan lines goes and I was checking the manual installation. I installed the Rplidar and Realsense drivers and add the environment variables to the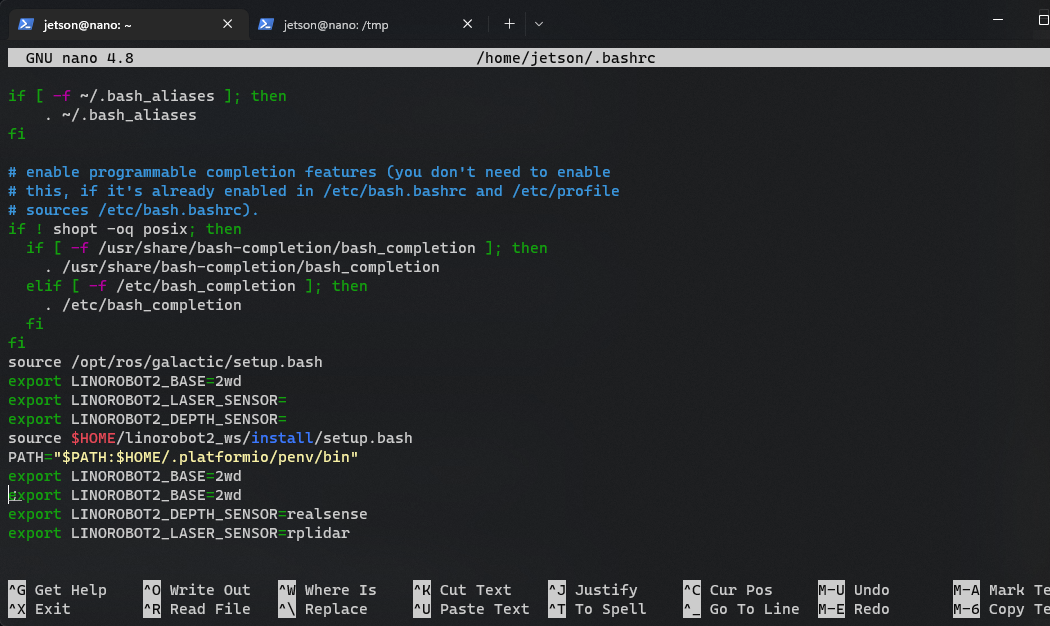
.bashrc. Out of curiosity, I opened the.bashrcand I find that theLINOROBOT2_DEPTH_SENSORandLINOROBOT2_LASER_SENSORvariables are not set.After I eddit the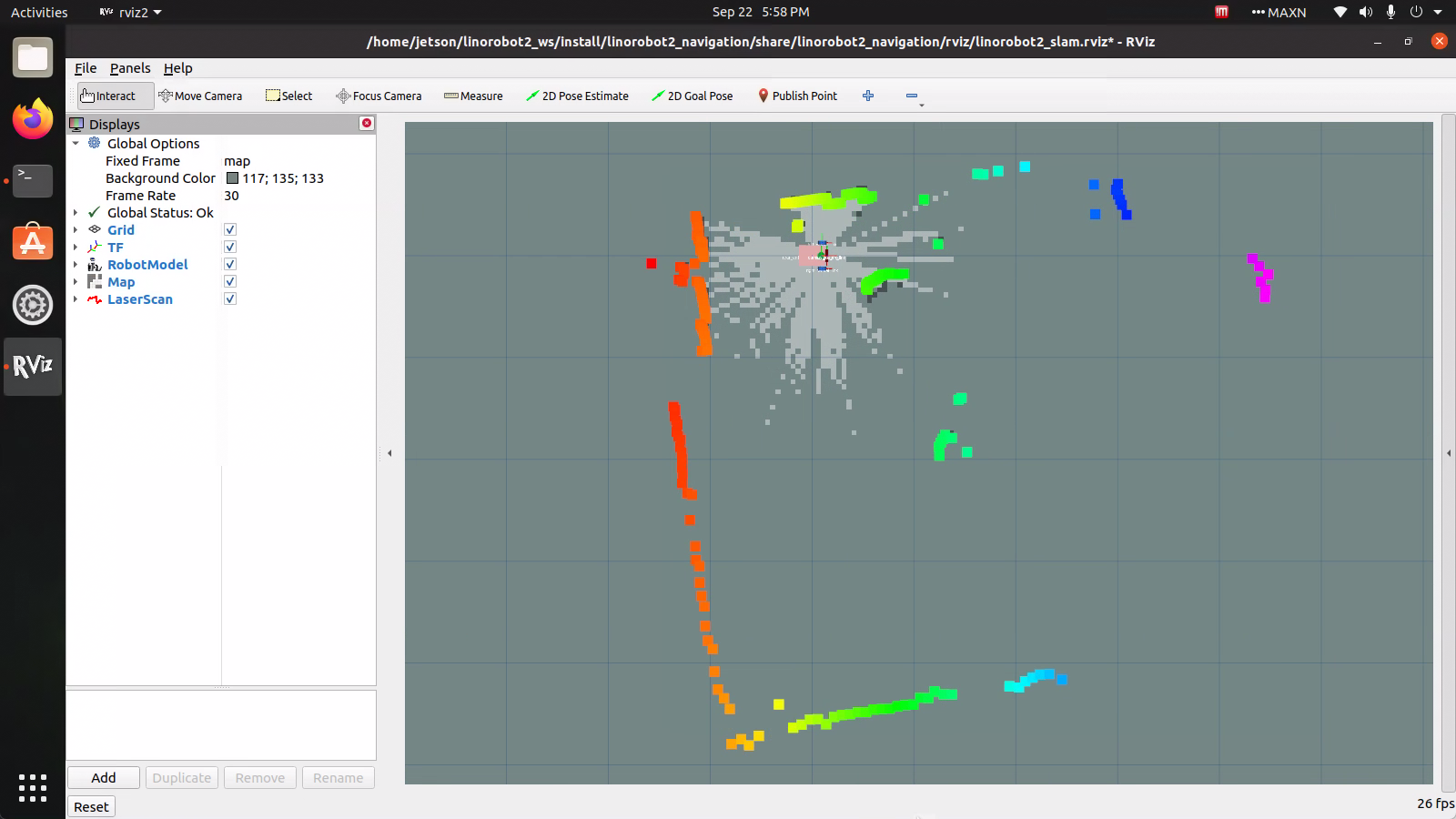
.bashrcand run the commandsource ~/.bashrc. The issue was fixed! No more errors.But seems like the Intel Realsense camera still have some issue. But that’s the problem for another day. 😭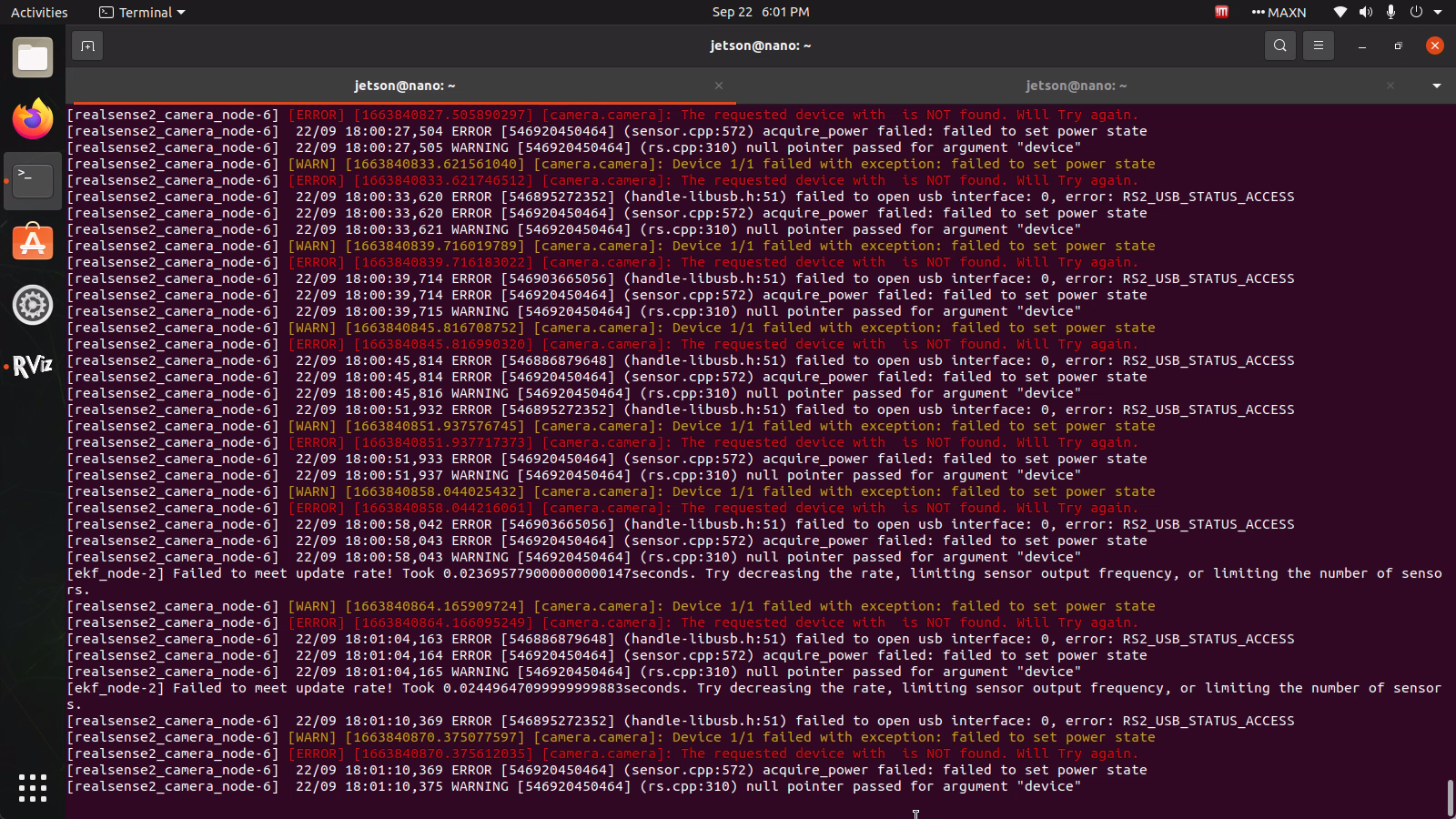
Thank for you help and guidance!