
Lightrun Answers was designed to reduce the constant googling that comes with debugging 3rd party libraries. It collects links to all the places you might be looking at while hunting down a tough bug.
And, if you’re still stuck at the end, we’re happy to hop on a call to see how we can help out.
[bug] ROS2 status always showing Offline
See original GitHub issue(Please add appropriate labels)
-
Windows: (Version)
-
Linux: (Ubuntu 20.04)
-
ROS 1: Dist
-
ROS 2: foxy
-
Version of the plugin: v0.8.2
what is the bug
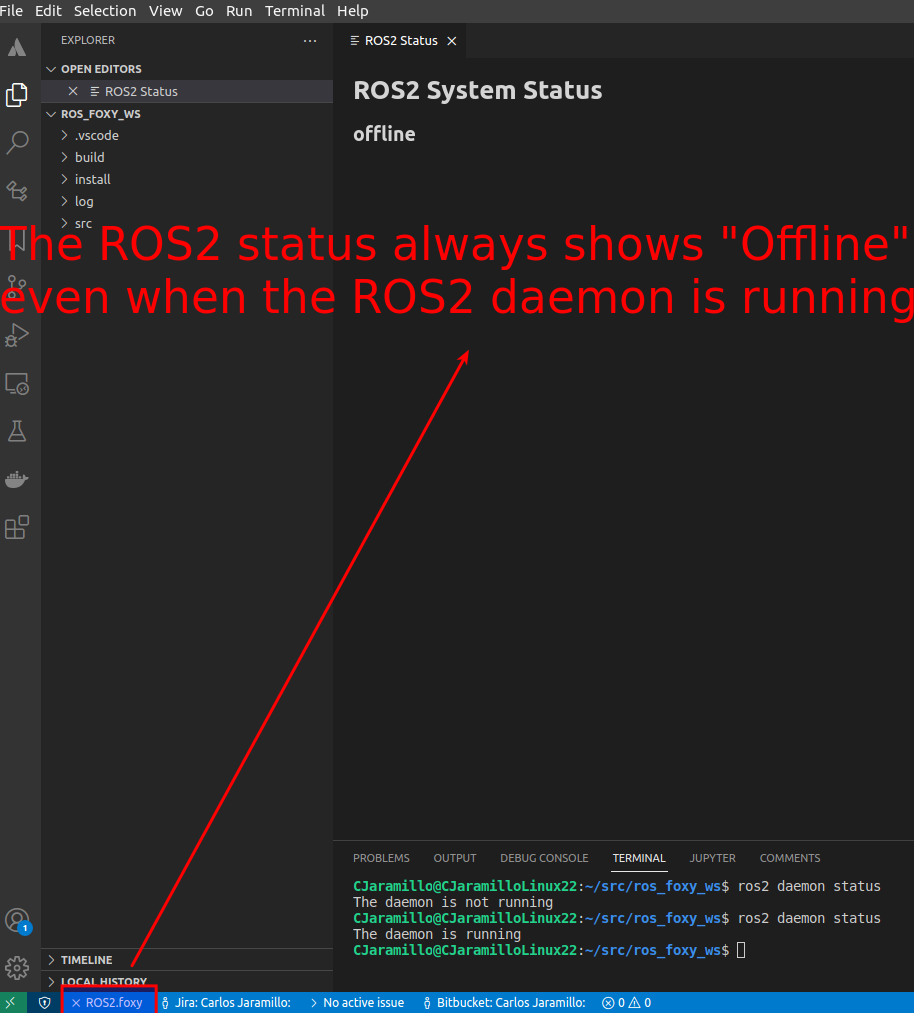
Even when the ROS2 daemon is running, the status is “Offline”.
Alternative bug
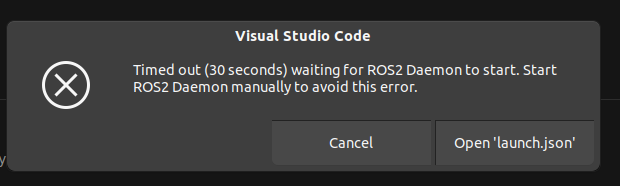
Also, I’m not able to launch anything. It times out waiting for the ROS daemon to start:
Repro steps
<how to reproduce the bug. Please attach sample files or github repo if appropriate.>
- Installed ROS2 foxy from binaries (as indicated in the ROS2 foxy installation tutorial, https://docs.ros.org/en/foxy/Installation/Ubuntu-Install-Debians.html)
- Installed the
vscode-rosplugging (Last updated:2/26/2022, 23:12:23) - Start the ROS2 daemon from the Cmd Pallete in VS Code (“ROS: Start”)
- Run the “ROS: Show Status” and expect to see the status page pop up as “Offline” (as shown in the screenshot)
- However, the
rus2 daemon statusfrom the Terminal shows it’s “running” (as shown in the screenshot)
expected behavior
I would expect to see the proper status and list of topics in the page
additional context
<any additional information would be helpful for a better understanding>
Issue Analytics
- State:

- Created a year ago
- Comments:6 (3 by maintainers)
 Top Related StackOverflow Question
Top Related StackOverflow Question Troubleshoot Live Code
Troubleshoot Live Code Top Related Reddit Thread
Top Related Reddit Thread Top Related Hackernoon Post
Top Related Hackernoon Post Top Related Tweet
Top Related Tweet Top Related Dev.to Post
Top Related Dev.to Post Top Related Hashnode Post
Top Related Hashnode Post
I had the exact same behavior. My problem was that I set the
ROS_DOMAIN_IDto a different value in my .bashrc file. Switching back to the default value made VSCode discover my ROS daemon.Maybe this helps to dig deeper into the issue.
Update: If I build the extension from source (version v0.8.3), it works as expected