
Lightrun Answers was designed to reduce the constant googling that comes with debugging 3rd party libraries. It collects links to all the places you might be looking at while hunting down a tough bug.
And, if you’re still stuck at the end, we’re happy to hop on a call to see how we can help out.
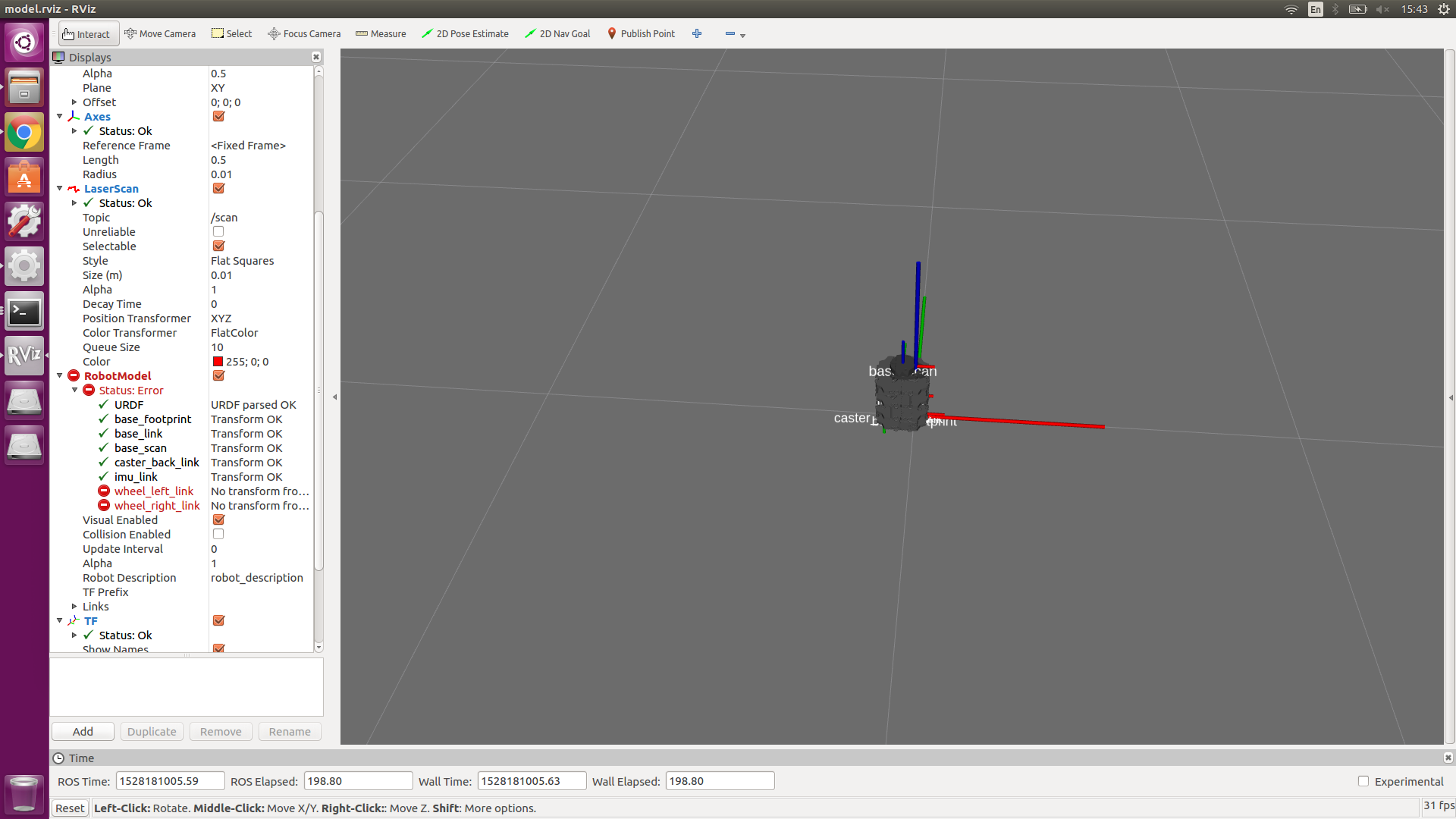
wheel_left_link and wheel_right_link not working in rviz while using docker
See original GitHub issueISSUE TEMPLATE ver. 0.2.0
-
Which TurtleBot3 you have?
- Burger
- Waffle
- Waffle Pi
-
Which SBC(Single Board Computer) is working on TurtleBot3?
- Raspberry Pi 3
- Intel Joule 570x
- etc (PLEASE, WRITE DOWN YOUR SBC HERE)
-
Which OS you installed in SBC?
- Ubuntu MATE 16.04 or later
- Raspbian
- etc (PLEASE, WRITE DOWN YOUR OS)
-
Which OS you installed in Remote PC?
- Ubuntu 16.04 LTS (Xenial Xerus)
- Ubuntu 18.04 LTS (Bionic Beaver)
- Linux Mint 18.x
- etc (PLEASE, WRITE DOWN YOUR OS) I am using a docker image based on Xenial
-
Write down software version and firmware version
- Software version: [1.2.0]
- Firmware version: [1.2.3]
-
Write down the commands you used in order
On remote pc:
roscore -p 11311
whether I do the -p 11311 or not does not make a difference
On turtlebotpi:
roslaunch turtlebot3_bringup turtlebot3_robot.launch
On remote pc:
roslaunch turtlebot3_bringup turtlebot3_remote.launch
rosrun rviz rviz -d `rospack find turtlebot3_description`/rviz/model.rviz
I have repeatedly checked that the $ROS_HOSTNAME and $ROS_MASTER_URI are set correctly on each machine according to your docs so I don’t know what is wrong
-
Copy and Paste your error message on terminal
There was no error in the terminal, rviz just failed to show the lidar points and there were errors shown for the wheels. The screenshot looked like this:
- Please, describe detailedly what difficulty you are in
I have made sure that my docker container is using the host’s network, that the times are synced between the turtlebot and the docker container, that the ros install follows the same steps outlined in your manual, and that I have followed through all of your setup instructions and I am still having this problem. Running ifconfig inside both the docker container and the pi show that the IP addresses are correct. Can someone please help me? I am running out of things to try…
Issue Analytics
- State:

- Created 4 years ago
- Comments:7 (4 by maintainers)
 Top Related StackOverflow Question
Top Related StackOverflow Question Troubleshoot Live Code
Troubleshoot Live Code Top Related Reddit Thread
Top Related Reddit Thread Top Related Hackernoon Post
Top Related Hackernoon Post Top Related Tweet
Top Related Tweet Top Related Dev.to Post
Top Related Dev.to Post Top Related Hashnode Post
Top Related Hashnode Post
@ubtjoe Good luck 😃
@ubtjoe
So glad you figured out the solution and thank you so much for your contribution! Ryan